













































Interview mit Jochen Vetter, Pilz
"MRK erfordert ein Umdenken"
Vor rund einem Jahr wurde die 'ISO Technical Specification zu Sicherheitsanforderungen bei der Kollaboration zwischen Mensch und Industrieroboter' veröffentlicht. Sie ist darauf ausgelegt, Licht in das regulatorische Dunkel der Mensch/Roboter-Kollaboration, kurz MRK, zu bringen. Ist das geschehen und alle Fragen geklärt? ROBOTIK UND PRODUKTION hat bei Jochen Vetter, Manager Robot Safety bei Pilz, nachgefragt.
 Bild: Pilz GmbH & Co. KG
Bild: Pilz GmbH & Co. KG Bild: Pilz GmbH & Co. KG
Bild: Pilz GmbH & Co. KGVor rund einem Jahr wurde die ISO/TS15066 veröffentlicht. Wie sieht das vorläufige Fazit von Pilz aus?
Jochen Vetter: Die Erwartungshaltung an die ISO/TS15066 war groß, denn mit den bestehenden Normen ließen sich Applikationen im Bereich MRK nicht wirklich umsetzen. Hier klaffte eine Lücke. Im neuen Dokument sind nun zum einen vier Kollaborationsarten als Schutzprinzipien genauer beschrieben. Zum anderen existieren auch detaillierte Angaben zu Schmerzschwellen für verschiedene Körperregionen. Diese Werte bilden die Basis, um die Applikation mit einer Leistungs- und Kraftbegrenzung realisieren zu können. Wer also MRK umsetzen will, hat nun ein offizielles Dokument an der Hand. Das schafft Klarheit. Doch allein durch die Lektüre kann man noch keine MRK-Applikation sicher machen. Die technische Spezifikation liefert eine gute Hilfestellung, ist aber kein Allheilmittel.
Pilz hat bereits eine Reihe von sicheren MRK-Applikationen umgesetzt. Aufbauend auf dieser Erfahrung: Wie schwierig ist eine Umsetzung der TS15066?
Vetter: Sie bleibt eine Herausforderung, da nicht beschrieben ist, auf welche Art und Weise Drücke und Kräfte zu messen sind. Es ist lediglich festgelegt, dass die Grenzwerte einzuhalten sind und welche Grenzwerte für welche Körperregionen gelten. Bei Pilz haben wir uns an der Inspektion von Lichtschranken orientiert, und Stück für Stück dem Thema genähert. Heute sind wir sehr zufrieden mit dem was wir erreicht haben: Wir haben neben einer sauberen Methodik für die Validierung auch eine eigene Messmethode entwickelt. Damit unterstützen wir nun tagtäglich unsere Kunden z.B. aus der Automobil-, Zuliefer- oder Elektronikindustrie.
 Bild: Pilz GmbH & Co. KG
Bild: Pilz GmbH & Co. KGWas rät Pilz Unternehmen, die MRK-Applikationen einführen wollen?
Vetter: Wer eine MRK-Applikation aufbauen möchte, der sollte im ersten Schritt seine Produktion unter die Lupe nehmen: Wo wäre ein geeigneter Platz, um das auszuprobieren? Um sich dem Thema zu nähern, sollte man nicht gleich versuchen MRK in den komplexesten Ablauf zu integrieren, sondern mit einfachen Produktionsschritten beginnen. Geeignet sind im übrigen Arbeitsplätze, wo die Ergonomie eine wichtige Rolle spielt. Wenn Roboter dort eingesetzt werden, wo sie Entlastung für den Menschen bringen, dann fördert das auch die Akzeptanz bei der Belegschaft. Wichtig ist es außerdem von Beginn an alle Seiten an einen Tisch zu bringen, insbesondere Elektrik, Mechanik und Arbeitssicherheit. Dann ist zu überlegen welche der vier Methoden aus der TS15066 bevorzugt wird, denn daraus ergibt sich der Robotertyp: beispielsweise sensitiv oder nicht. Weitere Kriterien bei der Wahl des Roboters sind benötigte Nutzlasten und Reichweiten. Letztlich geht es darum, Produktivität und Sicherheit in Einklang zu bringen.
Stichwort Sicherheit: Wann kommt die ins Spiel?
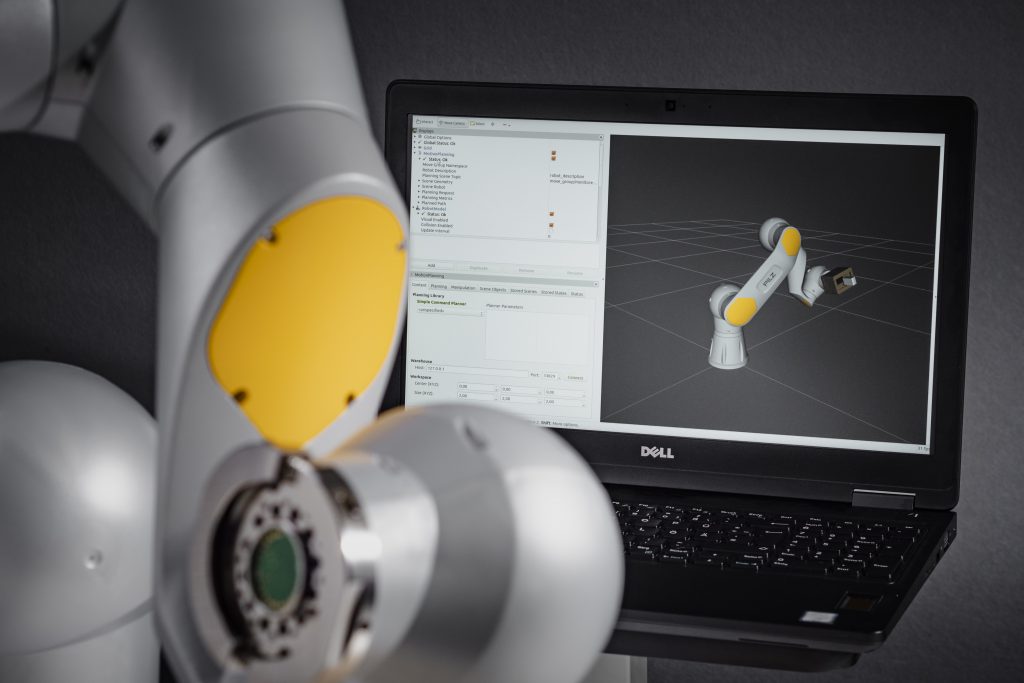
Vetter: Sobald eine erste Idee am CAD-System entsteht, hat man eine Diskussionsgrundlage und kann bereits mit einer Risikobeurteilung beginnen. Es ist wichtig, sich früh mit dem Thema Sicherheit auseinanderzusetzen und Experten wie Pilz miteinzubeziehen. Nur dann können Erfahrungen aus vorherigen Applikationen einfließen. Macht man sich erst nach Aufbau der Roboterapplikation Gedanken über die notwendige CE-Kennzeichnung, warten in der Konsequenz leider meist größere Umbaumaßnahmen, die nicht zuletzt die komplette Zeitplanung zumindest ins Wanken bringen.
 Bild: Pilz GmbH & Co. KG
Bild: Pilz GmbH & Co. KGWelche Gefährdungen gilt es denn überhaupt bei MRK zu berücksichtigen?
Vetter: Es gibt grundsätzlich zwei verschiedene Kollisionsarten: Der transiente Kontakt zwischen Mensch und Roboter entspricht einem Stoß durch den Roboter. Der Mensch wird von dem Roboter getroffen, hat aber die Möglichkeit zurückzuweichen. Er ist nicht eingeklemmt. Der quasi-statische Kontakt entspricht hingegen einer Quetschung des Menschen. Ein Ausweichen ist dann nicht mehr möglich - der Mensch wird ggf. festgehalten und kann sich nicht selbst befreien. Im Gegensatz zu Maschinen, die geschlossen sind, ist bei MRK-Anwendungen auch das Nahfeld zu betrachten. Es geht zudem darum, die Gefährdung durch Stolperstellen z.B. durch Leitungen der Spannungsversorgung zu eliminieren. Und man muss auch vorhersehbare Fehlanwendungen berücksichtigen.
 Bild: Pilz GmbH & Co. KG
Bild: Pilz GmbH & Co. KGWie lassen sich denn nun Kollisionen mildern?
Vetter: Zum einen durch roboterinterne Sensorik, die Kollisionen erkennt und den Roboter zum Stillstand bringt. Zum zum anderen muss man frühzeitig darauf achten, wie der Arbeitsplatz gestaltet ist. Das ist eine neue Herausforderung. Bei Arbeitsplätzen, die entweder nur für Menschen oder für Roboter ausgelegt sind, ist das nicht schwierig. Aber, wo Mensch und Roboter sich einen Arbeitsraum teilen, da gelten komplett neue Regeln für die Gestaltung. Während Kanten an traditionellen Arbeitsplätzen stumpf sein müssen, damit sich der Mensch im vorbeistreifen nicht schneidet, müssen sie bei MRK so abgerundet sein, dass auch dann nichts passiert, wenn der Roboter den Menschen aktiv dagegen drückt. Im besten Falle wird man versuchen, möglichst wenige Kanten zu haben. Das erfordert ein Umdenken der Industrie.
 Bild: Pilz GmbH & Co. KG
Bild: Pilz GmbH & Co. KGWas unterscheidet denn das MRK-Dienstleistungsangebot von Pilz von anderen Anbietern?
Vetter: Es ist der ganzheitliche Ansatz und die Tiefe, mit der wir die Robotik betrachten. So haben wir ein eigenes Kollisionsmessgerät entwickelt, das die Drücke und Kräfte der Roboterbewegung misst. Aufbauend auf der jahrelangen Erfahrung beim Thema CE-Kennzeichnung in der Industrie haben wir uns das Know-how selbst erarbeitet. Dieses Wissen aus der Praxis geben wir in unseren Schulungen und Trainings weiter. Und schließlich können wir den Anwender nicht nur bis zur CE-Kennzeichnung begleiten, sondern wir unterschreiben die entsprechende Konformitätsbewertung und übernehmen damit die Verantwortung für das, was wir beurteilt, umgesetzt und validiert haben.
Stichwort Validierung: Wie schwierig ist die Validierung wirklich?
Vetter: Die Validierung an sich ist nicht das Knifflige, sondern eher die notwendige Basis. Denn ich muss ja eine Argumentation haben, warum ich was und wie messe und welche Körperstelle ich simuliere. Das basiert auf den Ergebnissen der Risikobeurteilung. Dort muss ich komplett die möglichen Kollisionsszenarien bei bestimmungsgemäßer Verwendung und bei vorhersehbarer Fehlanwendung genauestens definieren. Dazu muss man vor Ort sein und die Gegebenheiten beim Kunden kennen: Wie ist der Arbeitsplatz beschaffen, welche Personen oder welcher Personenkreis halten sich im Arbeitsbereich auf? Befindet sich der Roboter beispielsweise an einem stark frequentierten Hauptweg? Dann wird die Applikation sicher anders aussehen.
Bild: Pilz GmbH & Co. KGDass der Roboterarm die Kollision selbst erkennt, reicht also nicht aus?
Vetter: Robotersysteme heute verfügen über clevere Sicherheitsfunktionen, sind aber nicht eigensicher, da sie die Dynamik bei einer Kollision nicht betrachten. Erst bei der Kollision beginnt der Roboter seine Bewegung zu verzögern. Welche Kräfte bei einer Kollision also tatsächlich herrschen, ist daher auch abhängig von der kinematischen Position des Roboters, der Massenträgheit oder davon welche Last verbaut ist. Das kann dann gut das Zwei- bis Fünffache des eingestellten Grenzwertes sein. Die Sicherheitswerte für den Roboterarm sind also nicht absolut zu sehen, sondern eher als Maß der Feinfühligkeit. Der angegebene Performance Level sagt nur etwas aus über die Güte der Sicherheitsfunktion des Roboterarms. Um eine Messung von Kraft und Druck kommt man also nicht herum.
Wie sieht es international mit dem Thema MRK aus?
Vetter: MRK ist momentan besonders in Europa ein großes Thema. Aber wir führen auch Projekte in Asien oder Amerika durch, denn Robotics Services bietet Pilz inzwischen international an. Grundlage ist unsere weltweit gültige Methode, wie man bei der Validierung vorgeht. Was von Region zu Region abweicht, das sind lediglich normative Referenzen für den Körper, z.B. bei der Körpergröße. Unser Ziel ist es, überall dieselben Sicherheitsstandards zu etablieren. Interessant finde ich, dass der deutsche Begriff MRK auch schon im Ausland verwendet wird, ähnlich wie Industrie 4.0.
Was bringt die Zukunft?:
Vetter: Bei der TS15066 wird es in jedem Falle weitergehen. Denn eine technische Spezifikation muss spätestens nach vier Jahren überarbeitet werden und dann muss entschieden werden, ob daraus eine eigenständige Norm wird, die TS in bestehende Normen integriert wird oder ob sie sogar fallengelassen wird. Momentan wird diskutiert, ob die Grenzwerte für Kollisionen zu hoch angesetzt sind. Allgemein gesehen wird es künftig darum gehen, Roboteranwendungen mobil auf Plattformen umzusetzen. Das Thema MRK bleibt also spannend!
Vor rund einem Jahr wurde die 'ISO Technical Specification zu Sicherheitsanforderungen bei der Kollaboration zwischen Mensch und Industrieroboter' veröffentlicht. Sie ist darauf ausgelegt, Licht in das regulatorische Dunkel der Mensch/Roboter-Kollaboration, kurz MRK, zu bringen. Ist das geschehen und alle Fragen geklärt? ROBOTIK UND PRODUKTION hat bei Jochen Vetter, Manager Robot Safety bei Pilz, nachgefragt.
Bild: Pilz GmbH & Co. KGBild: Pilz GmbH & Co. KGVor rund einem Jahr wurde die ISO/TS15066 veröffentlicht. Wie sieht das vorläufige Fazit von Pilz aus?
Jochen Vetter: Die Erwartungshaltung an die ISO/TS15066 war groß, denn mit den bestehenden Normen ließen sich Applikationen im Bereich MRK nicht wirklich umsetzen. Hier klaffte eine Lücke. Im neuen Dokument sind nun zum einen vier Kollaborationsarten als Schutzprinzipien genauer beschrieben. Zum anderen existieren auch detaillierte Angaben zu Schmerzschwellen für verschiedene Körperregionen. Diese Werte bilden die Basis, um die Applikation mit einer Leistungs- und Kraftbegrenzung realisieren zu können. Wer also MRK umsetzen will, hat nun ein offizielles Dokument an der Hand. Das schafft Klarheit. Doch allein durch die Lektüre kann man noch keine MRK-Applikation sicher machen. Die technische Spezifikation liefert eine gute Hilfestellung, ist aber kein Allheilmittel.
Pilz hat bereits eine Reihe von sicheren MRK-Applikationen umgesetzt. Aufbauend auf dieser Erfahrung: Wie schwierig ist eine Umsetzung der TS15066?
Vetter: Sie bleibt eine Herausforderung, da nicht beschrieben ist, auf welche Art und Weise Drücke und Kräfte zu messen sind. Es ist lediglich festgelegt, dass die Grenzwerte einzuhalten sind und welche Grenzwerte für welche Körperregionen gelten. Bei Pilz haben wir uns an der Inspektion von Lichtschranken orientiert, und Stück für Stück dem Thema genähert. Heute sind wir sehr zufrieden mit dem was wir erreicht haben: Wir haben neben einer sauberen Methodik für die Validierung auch eine eigene Messmethode entwickelt. Damit unterstützen wir nun tagtäglich unsere Kunden z.B. aus der Automobil-, Zuliefer- oder Elektronikindustrie.
Bild: Pilz GmbH & Co. KGWas rät Pilz Unternehmen, die MRK-Applikationen einführen wollen?
Vetter: Wer eine MRK-Applikation aufbauen möchte, der sollte im ersten Schritt seine Produktion unter die Lupe nehmen: Wo wäre ein geeigneter Platz, um das auszuprobieren? Um sich dem Thema zu nähern, sollte man nicht gleich versuchen MRK in den komplexesten Ablauf zu integrieren, sondern mit einfachen Produktionsschritten beginnen. Geeignet sind im übrigen Arbeitsplätze, wo die Ergonomie eine wichtige Rolle spielt. Wenn Roboter dort eingesetzt werden, wo sie Entlastung für den Menschen bringen, dann fördert das auch die Akzeptanz bei der Belegschaft. Wichtig ist es außerdem von Beginn an alle Seiten an einen Tisch zu bringen, insbesondere Elektrik, Mechanik und Arbeitssicherheit. Dann ist zu überlegen welche der vier Methoden aus der TS15066 bevorzugt wird, denn daraus ergibt sich der Robotertyp: beispielsweise sensitiv oder nicht. Weitere Kriterien bei der Wahl des Roboters sind benötigte Nutzlasten und Reichweiten. Letztlich geht es darum, Produktivität und Sicherheit in Einklang zu bringen.
Stichwort Sicherheit: Wann kommt die ins Spiel?
Vetter: Sobald eine erste Idee am CAD-System entsteht, hat man eine Diskussionsgrundlage und kann bereits mit einer Risikobeurteilung beginnen. Es ist wichtig, sich früh mit dem Thema Sicherheit auseinanderzusetzen und Experten wie Pilz miteinzubeziehen. Nur dann können Erfahrungen aus vorherigen Applikationen einfließen. Macht man sich erst nach Aufbau der Roboterapplikation Gedanken über die notwendige CE-Kennzeichnung, warten in der Konsequenz leider meist größere Umbaumaßnahmen, die nicht zuletzt die komplette Zeitplanung zumindest ins Wanken bringen.
Bild: Pilz GmbH & Co. KGWelche Gefährdungen gilt es denn überhaupt bei MRK zu berücksichtigen?
Vetter: Es gibt grundsätzlich zwei verschiedene Kollisionsarten: Der transiente Kontakt zwischen Mensch und Roboter entspricht einem Stoß durch den Roboter. Der Mensch wird von dem Roboter getroffen, hat aber die Möglichkeit zurückzuweichen. Er ist nicht eingeklemmt. Der quasi-statische Kontakt entspricht hingegen einer Quetschung des Menschen. Ein Ausweichen ist dann nicht mehr möglich - der Mensch wird ggf. festgehalten und kann sich nicht selbst befreien. Im Gegensatz zu Maschinen, die geschlossen sind, ist bei MRK-Anwendungen auch das Nahfeld zu betrachten. Es geht zudem darum, die Gefährdung durch Stolperstellen z.B. durch Leitungen der Spannungsversorgung zu eliminieren. Und man muss auch vorhersehbare Fehlanwendungen berücksichtigen.
Bild: Pilz GmbH & Co. KGWie lassen sich denn nun Kollisionen mildern?
Vetter: Zum einen durch roboterinterne Sensorik, die Kollisionen erkennt und den Roboter zum Stillstand bringt. Zum zum anderen muss man frühzeitig darauf achten, wie der Arbeitsplatz gestaltet ist. Das ist eine neue Herausforderung. Bei Arbeitsplätzen, die entweder nur für Menschen oder für Roboter ausgelegt sind, ist das nicht schwierig. Aber, wo Mensch und Roboter sich einen Arbeitsraum teilen, da gelten komplett neue Regeln für die Gestaltung. Während Kanten an traditionellen Arbeitsplätzen stumpf sein müssen, damit sich der Mensch im vorbeistreifen nicht schneidet, müssen sie bei MRK so abgerundet sein, dass auch dann nichts passiert, wenn der Roboter den Menschen aktiv dagegen drückt. Im besten Falle wird man versuchen, möglichst wenige Kanten zu haben. Das erfordert ein Umdenken der Industrie.
Bild: Pilz GmbH & Co. KGWas unterscheidet denn das MRK-Dienstleistungsangebot von Pilz von anderen Anbietern?
Vetter: Es ist der ganzheitliche Ansatz und die Tiefe, mit der wir die Robotik betrachten. So haben wir ein eigenes Kollisionsmessgerät entwickelt, das die Drücke und Kräfte der Roboterbewegung misst. Aufbauend auf der jahrelangen Erfahrung beim Thema CE-Kennzeichnung in der Industrie haben wir uns das Know-how selbst erarbeitet. Dieses Wissen aus der Praxis geben wir in unseren Schulungen und Trainings weiter. Und schließlich können wir den Anwender nicht nur bis zur CE-Kennzeichnung begleiten, sondern wir unterschreiben die entsprechende Konformitätsbewertung und übernehmen damit die Verantwortung für das, was wir beurteilt, umgesetzt und validiert haben.
Stichwort Validierung: Wie schwierig ist die Validierung wirklich?
Vetter: Die Validierung an sich ist nicht das Knifflige, sondern eher die notwendige Basis. Denn ich muss ja eine Argumentation haben, warum ich was und wie messe und welche Körperstelle ich simuliere. Das basiert auf den Ergebnissen der Risikobeurteilung. Dort muss ich komplett die möglichen Kollisionsszenarien bei bestimmungsgemäßer Verwendung und bei vorhersehbarer Fehlanwendung genauestens definieren. Dazu muss man vor Ort sein und die Gegebenheiten beim Kunden kennen: Wie ist der Arbeitsplatz beschaffen, welche Personen oder welcher Personenkreis halten sich im Arbeitsbereich auf? Befindet sich der Roboter beispielsweise an einem stark frequentierten Hauptweg? Dann wird die Applikation sicher anders aussehen.
Bild: Pilz GmbH & Co. KGDass der Roboterarm die Kollision selbst erkennt, reicht also nicht aus?
Vetter: Robotersysteme heute verfügen über clevere Sicherheitsfunktionen, sind aber nicht eigensicher, da sie die Dynamik bei einer Kollision nicht betrachten. Erst bei der Kollision beginnt der Roboter seine Bewegung zu verzögern. Welche Kräfte bei einer Kollision also tatsächlich herrschen, ist daher auch abhängig von der kinematischen Position des Roboters, der Massenträgheit oder davon welche Last verbaut ist. Das kann dann gut das Zwei- bis Fünffache des eingestellten Grenzwertes sein. Die Sicherheitswerte für den Roboterarm sind also nicht absolut zu sehen, sondern eher als Maß der Feinfühligkeit. Der angegebene Performance Level sagt nur etwas aus über die Güte der Sicherheitsfunktion des Roboterarms. Um eine Messung von Kraft und Druck kommt man also nicht herum.
Wie sieht es international mit dem Thema MRK aus?
Vetter: MRK ist momentan besonders in Europa ein großes Thema. Aber wir führen auch Projekte in Asien oder Amerika durch, denn Robotics Services bietet Pilz inzwischen international an. Grundlage ist unsere weltweit gültige Methode, wie man bei der Validierung vorgeht. Was von Region zu Region abweicht, das sind lediglich normative Referenzen für den Körper, z.B. bei der Körpergröße. Unser Ziel ist es, überall dieselben Sicherheitsstandards zu etablieren. Interessant finde ich, dass der deutsche Begriff MRK auch schon im Ausland verwendet wird, ähnlich wie Industrie 4.0.
Was bringt die Zukunft?:
Vetter: Bei der TS15066 wird es in jedem Falle weitergehen. Denn eine technische Spezifikation muss spätestens nach vier Jahren überarbeitet werden und dann muss entschieden werden, ob daraus eine eigenständige Norm wird, die TS in bestehende Normen integriert wird oder ob sie sogar fallengelassen wird. Momentan wird diskutiert, ob die Grenzwerte für Kollisionen zu hoch angesetzt sind. Allgemein gesehen wird es künftig darum gehen, Roboteranwendungen mobil auf Plattformen umzusetzen. Das Thema MRK bleibt also spannend!
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
Pilz GmbH & Co. KG
Dieser Artikel erschien in ROBOTIK UND PRODUKTION 2 2017 - 22.05.17.Für weitere Artikel besuchen Sie www.robotik-produktion.de

