
















































Durchgängige Steuerungslösung für intelligente Logistiksysteme
Leistungsfähige und kompakte FTS-Lasernavigationssysteme
Neben der Entwicklung von selbstfahrenden Industriefahrzeuge und Logistikrobotern bilden Steuerungstechnik und Algorithmen für deren Lasernavigation den zentralen Tätigkeitsbereich der chinesischen Firma i-Cow. Mit einer durchgängig eingesetzten Steuerungslösung lassen sich diese Produkte nicht nur effizient entwickeln und leistungsfähig konzipieren. Sie werden auch den steigenden Anforderungen in der smarten Fabrik gerecht.
 Bild: Suzhou i-Cow Intelligent Logistics Technology, China
Bild: Suzhou i-Cow Intelligent Logistics Technology, ChinaUm die Bedürfnisse nach automatisierter Lagerlogistik zu erfüllen, hat i-Cow eine umfangreiche Serie von Gabelstapler-FTS mit Lasernavigation auf den Markt gebracht. Darüber hinaus bietet das Unternehmen für Hersteller bzw. Integratoren von FTS individuelle Lösungen zur Einbindung in deren eigene Hardware an.
 Bild: Suzhou i-Cow Intelligent Logistics Technology, China
Bild: Suzhou i-Cow Intelligent Logistics Technology, ChinaLasernavigation als Logistik-Tool
Eine zentrale Herausforderung bei FTS ist deren flexible und zuverlässige Navigation innerhalb des Warenbestands. Eine Lösung bietet die rechnergestützte Steuerung mittels Lasertechnik. Sie erlaubt die freie Navigation im Raum und bietet durch den Wegfall aufwendiger Bodeninstallationen auch Kostenvorteile. Die FTS-Lösungen von i-Cow können so Waren automatisch aufnehmen und in Regale einlagern. Die Lasernavigation kann mit nur einem Fahrzeug, in Verbindung mit einem Verkehrsmanagementsystem aber auch mit mehreren Fahrzeugen arbeiten. Bei dieser Art der Navigation setzt das chinesische Unternehmen durchgängig auf Steuerungskomponenten von Beckhoff. Die Steuerung übernimmt ein IPC mit Dualcore-Intel-Atom-CPU, hinzu kommt Panel mit 5,7“-Touchscreen für Visualisierung und Bedienung. Die Bedienoberfläche TwinCat 3 PLC HMI, erleichtert die Konfiguration der FTS-Parameter, die FTS-Positionierung und die Fehlersuche bei den Lagerstationen. Den Anforderungen an Geschwindigkeit und Präzision der Lasernavigation wird man durch den Einsatz von XFC-Klemmen mit Oversampling-Funktion gerecht. Mit TwinSafe bietet Beckhoff zudem eine nahtlos integrierte Sicherheitslösung an.
Leistungsstarke Steuerungsplattform
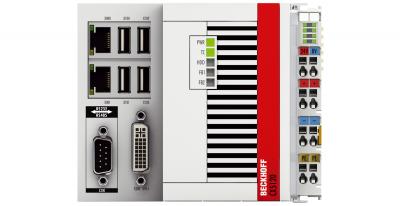
Der Embedded-PC CX5130 führt alle notwendigen Steuerungsfunktionen aus und ersetzt damit das herkömmlich verwendete System aus Navigations-Controller und Kommunikationsmodul. Das reduziert sowohl den Platzbedarf als auch die Kosten. Zu den implementierten Funktionen gehören ein Lasernavigationsalgorithmus sowie ein Regelkreis der Lauf- und Steuerachsen des FTS. Beide sind in C++ programmiert. Hinzu kommen ein Steuerungslogikprogramm für ein einzelnes FTS, die Bedienoberfläche sowie eine Planungssoftware und ein TCP/IP-Kommunikationsprogramm der automatischen Ladestation. „Wir haben den CX5130 wegen seiner Leistung, den Schnittstellen und der kompakten Bauform gewählt“, erklärt Yongping Pan, Direktor für Forschung und Entwicklung bei i-Cow. Die hutschienenmontierbare Konstruktion spart im Vergleich zu vorher eingesetzten Steuerungen viel Platz. „Ein weiterer Vorteil besteht darin, dass das Busklemmensystem von Beckhoff unterschiedliche Feldbusse wie CANopen und Profibus unterstützt und dadurch mit unserer vorhandenen Geräteperipherie kompatibel ist.“ Außerdem sind Ethernet-Schnittstellen und verschiedene Protokolle im Embedded-PC integriert, was die Implementierung auch drahtloser Kommunikation erleichtert.
 Bild: Suzhou i-Cow Intelligent Logistics Technology, China
Bild: Suzhou i-Cow Intelligent Logistics Technology, ChinaPräzise Lasernavigation
Während des Navigationsbetriebs führt der integrierte Laserscanner schnelle Rotationsbewegungen aus und tastet auf diese Weise die im Arbeitsbereich verteilten Reflexionsmarkierungen ab. Erst wenn ausreichend viele dieser Markierungen abgetastet wurden, lässt sich der genaue Standort des FTS berechnen. Entscheidend sind dabei Präzision und eine hohe Abtastgeschwindigkeit. Um das zu erreichen, nutzt i-Cow die XFC-EtherCat-Digital-Eingangsklemme EL1262 mit Oversampling-Funktion. Sie ermöglicht eine besonders hoch aufgelöste Soll- und Istwerterfassung und kann in 1ms bis 1.000 Abtastvorgänge durchführen. Das entspricht einem Abtastzyklus von 1µs. Die Vorzüge auf der Hardwareseite werden durch die Steuerungssoftware ergänzt. Bei i-Cow profitiert man z.B. davon, dass TwinCat 3 auch die Programmierung in C++ sowie einen Modulaufruf unterstützt. Das vereinfacht zum einen den Entwicklungsprozess und zum anderen die Migration des Navigationsalgorithmus. Durch den flexiblen und modularen Aufbau stellt die Software eine effiziente Entwicklungsumgebung zur Erstellung unterschiedlicher Tools dar und ermöglicht darüber hinaus die kollaborative Teamarbeit. „Für uns ist die Nutzung von C/C++ als Programmiersprache sehr wichtig, da wir hier über eine langjährige Erfahrung verfügen und auch komplexe Funktionsbausteine implementieren können“, betont Zhifei Yu, Direktor der Entwicklungsabteilung von i-Cow. Ist die Programmierung in C++ ein fester Bestandteil des Prozesses, können die Bausteine schnell und einfach als gekapselte Funktionen in TwinCat 3 eingebettet werden. Weiterhin lassen sich einzelne Programmaufgaben auf mehrere CPU-Kerne verteilen. Das führt dazu, dass die Rechenleistung von Multicore-CPUs effizienter nutzbar und die Programme leistungsfähiger sind.
Integrierte Sicherheitslösung
Obwohl fahrerlose Transportsysteme mit Lasernavigation große Teile der Lagerarbeit übernehmen können, teilen sie sich ihr Arbeitsumfeld nach wie vor mit Menschen. Aus diesem Grund nimmt der Kollisionsschutz eine zentrale Rolle ein. Hier hat sich i-Cow für eine umfassende, mit TwinSafe realisierte Lösung entschieden. Umgesetzt wird sie mit der Logic EL6900, der digitalen Eingangsklemme EL1904 und der digitalen Ausgangsklemme EL2904. Das Fahrgestell von FTS ist mit ringsum verteilten Sicherheitssensoren ausgestattet, die über die Eingangsklemme EL1904 abgefragt werden. Erkennen diese Sensoren ein Hindernis im Sicherheitsbereich, reagiert die Safety-Lösung sofort, löst zunächst die Notbremse der FTS-Laufachse aus und schaltet dann nach einer eingestellten Verzögerungszeit auch die Stromversorgung des Antriebs ab. Die nahtlos in die Steuerungstechnik integrierte Sicherheitslösung macht ein separates Sicherheitssystem und den damit verbundenen Aufwand unnötig.
Zukunftssichere Lösungen
Seit i-Cow 2016 begonnen hat, die Lasernavigation der Gabelstapler-FTS über Beckhoff-Komponenten zu realisieren, ist die Zusammenarbeit der beiden Unternehmen enger und umfangreicher geworden. Die Automatisierungslösungen werden nun auch bei der Entwicklung von magnetisch gelenkten Shuttle-Fahrzeugen sowie bei Fahrzeugen für intelligente Regalsysteme verwendet. „Die Offenheit und Flexibilität der PC-basierten Automatisierungsplattform verschafft und die nötigen Freiräume zur Lösung vieler Anwendungsprobleme“, kommentiert Wang Ping, Hauptgeschäftsführer von i-Cow. Er ist sich sicher: „Mit der Leistungsfähigkeit der PC-basierten Steuerungstechnik sind wir auch in Zukunft in der Lage, den ständig wachsenden Steuerungsanforderungen gerecht zu werden.“
Neben der Entwicklung von selbstfahrenden Industriefahrzeuge und Logistikrobotern bilden Steuerungstechnik und Algorithmen für deren Lasernavigation den zentralen Tätigkeitsbereich der chinesischen Firma i-Cow. Mit einer durchgängig eingesetzten Steuerungslösung lassen sich diese Produkte nicht nur effizient entwickeln und leistungsfähig konzipieren. Sie werden auch den steigenden Anforderungen in der smarten Fabrik gerecht.
Bild: Suzhou i-Cow Intelligent Logistics Technology, ChinaUm die Bedürfnisse nach automatisierter Lagerlogistik zu erfüllen, hat i-Cow eine umfangreiche Serie von Gabelstapler-FTS mit Lasernavigation auf den Markt gebracht. Darüber hinaus bietet das Unternehmen für Hersteller bzw. Integratoren von FTS individuelle Lösungen zur Einbindung in deren eigene Hardware an.
Bild: Suzhou i-Cow Intelligent Logistics Technology, ChinaLasernavigation als Logistik-Tool
Eine zentrale Herausforderung bei FTS ist deren flexible und zuverlässige Navigation innerhalb des Warenbestands. Eine Lösung bietet die rechnergestützte Steuerung mittels Lasertechnik. Sie erlaubt die freie Navigation im Raum und bietet durch den Wegfall aufwendiger Bodeninstallationen auch Kostenvorteile. Die FTS-Lösungen von i-Cow können so Waren automatisch aufnehmen und in Regale einlagern. Die Lasernavigation kann mit nur einem Fahrzeug, in Verbindung mit einem Verkehrsmanagementsystem aber auch mit mehreren Fahrzeugen arbeiten. Bei dieser Art der Navigation setzt das chinesische Unternehmen durchgängig auf Steuerungskomponenten von Beckhoff. Die Steuerung übernimmt ein IPC mit Dualcore-Intel-Atom-CPU, hinzu kommt Panel mit 5,7“-Touchscreen für Visualisierung und Bedienung. Die Bedienoberfläche TwinCat 3 PLC HMI, erleichtert die Konfiguration der FTS-Parameter, die FTS-Positionierung und die Fehlersuche bei den Lagerstationen. Den Anforderungen an Geschwindigkeit und Präzision der Lasernavigation wird man durch den Einsatz von XFC-Klemmen mit Oversampling-Funktion gerecht. Mit TwinSafe bietet Beckhoff zudem eine nahtlos integrierte Sicherheitslösung an.
Leistungsstarke Steuerungsplattform
Der Embedded-PC CX5130 führt alle notwendigen Steuerungsfunktionen aus und ersetzt damit das herkömmlich verwendete System aus Navigations-Controller und Kommunikationsmodul. Das reduziert sowohl den Platzbedarf als auch die Kosten. Zu den implementierten Funktionen gehören ein Lasernavigationsalgorithmus sowie ein Regelkreis der Lauf- und Steuerachsen des FTS. Beide sind in C++ programmiert. Hinzu kommen ein Steuerungslogikprogramm für ein einzelnes FTS, die Bedienoberfläche sowie eine Planungssoftware und ein TCP/IP-Kommunikationsprogramm der automatischen Ladestation. „Wir haben den CX5130 wegen seiner Leistung, den Schnittstellen und der kompakten Bauform gewählt“, erklärt Yongping Pan, Direktor für Forschung und Entwicklung bei i-Cow. Die hutschienenmontierbare Konstruktion spart im Vergleich zu vorher eingesetzten Steuerungen viel Platz. „Ein weiterer Vorteil besteht darin, dass das Busklemmensystem von Beckhoff unterschiedliche Feldbusse wie CANopen und Profibus unterstützt und dadurch mit unserer vorhandenen Geräteperipherie kompatibel ist.“ Außerdem sind Ethernet-Schnittstellen und verschiedene Protokolle im Embedded-PC integriert, was die Implementierung auch drahtloser Kommunikation erleichtert.
Bild: Suzhou i-Cow Intelligent Logistics Technology, ChinaPräzise Lasernavigation
Während des Navigationsbetriebs führt der integrierte Laserscanner schnelle Rotationsbewegungen aus und tastet auf diese Weise die im Arbeitsbereich verteilten Reflexionsmarkierungen ab. Erst wenn ausreichend viele dieser Markierungen abgetastet wurden, lässt sich der genaue Standort des FTS berechnen. Entscheidend sind dabei Präzision und eine hohe Abtastgeschwindigkeit. Um das zu erreichen, nutzt i-Cow die XFC-EtherCat-Digital-Eingangsklemme EL1262 mit Oversampling-Funktion. Sie ermöglicht eine besonders hoch aufgelöste Soll- und Istwerterfassung und kann in 1ms bis 1.000 Abtastvorgänge durchführen. Das entspricht einem Abtastzyklus von 1µs. Die Vorzüge auf der Hardwareseite werden durch die Steuerungssoftware ergänzt. Bei i-Cow profitiert man z.B. davon, dass TwinCat 3 auch die Programmierung in C++ sowie einen Modulaufruf unterstützt. Das vereinfacht zum einen den Entwicklungsprozess und zum anderen die Migration des Navigationsalgorithmus. Durch den flexiblen und modularen Aufbau stellt die Software eine effiziente Entwicklungsumgebung zur Erstellung unterschiedlicher Tools dar und ermöglicht darüber hinaus die kollaborative Teamarbeit. „Für uns ist die Nutzung von C/C++ als Programmiersprache sehr wichtig, da wir hier über eine langjährige Erfahrung verfügen und auch komplexe Funktionsbausteine implementieren können“, betont Zhifei Yu, Direktor der Entwicklungsabteilung von i-Cow. Ist die Programmierung in C++ ein fester Bestandteil des Prozesses, können die Bausteine schnell und einfach als gekapselte Funktionen in TwinCat 3 eingebettet werden. Weiterhin lassen sich einzelne Programmaufgaben auf mehrere CPU-Kerne verteilen. Das führt dazu, dass die Rechenleistung von Multicore-CPUs effizienter nutzbar und die Programme leistungsfähiger sind.
Integrierte Sicherheitslösung
Obwohl fahrerlose Transportsysteme mit Lasernavigation große Teile der Lagerarbeit übernehmen können, teilen sie sich ihr Arbeitsumfeld nach wie vor mit Menschen. Aus diesem Grund nimmt der Kollisionsschutz eine zentrale Rolle ein. Hier hat sich i-Cow für eine umfassende, mit TwinSafe realisierte Lösung entschieden. Umgesetzt wird sie mit der Logic EL6900, der digitalen Eingangsklemme EL1904 und der digitalen Ausgangsklemme EL2904. Das Fahrgestell von FTS ist mit ringsum verteilten Sicherheitssensoren ausgestattet, die über die Eingangsklemme EL1904 abgefragt werden. Erkennen diese Sensoren ein Hindernis im Sicherheitsbereich, reagiert die Safety-Lösung sofort, löst zunächst die Notbremse der FTS-Laufachse aus und schaltet dann nach einer eingestellten Verzögerungszeit auch die Stromversorgung des Antriebs ab. Die nahtlos in die Steuerungstechnik integrierte Sicherheitslösung macht ein separates Sicherheitssystem und den damit verbundenen Aufwand unnötig.
Zukunftssichere Lösungen
Seit i-Cow 2016 begonnen hat, die Lasernavigation der Gabelstapler-FTS über Beckhoff-Komponenten zu realisieren, ist die Zusammenarbeit der beiden Unternehmen enger und umfangreicher geworden. Die Automatisierungslösungen werden nun auch bei der Entwicklung von magnetisch gelenkten Shuttle-Fahrzeugen sowie bei Fahrzeugen für intelligente Regalsysteme verwendet. „Die Offenheit und Flexibilität der PC-basierten Automatisierungsplattform verschafft und die nötigen Freiräume zur Lösung vieler Anwendungsprobleme“, kommentiert Wang Ping, Hauptgeschäftsführer von i-Cow. Er ist sich sicher: „Mit der Leistungsfähigkeit der PC-basierten Steuerungstechnik sind wir auch in Zukunft in der Lage, den ständig wachsenden Steuerungsanforderungen gerecht zu werden.“
Beckhoff Automation GmbH & Co. KG
Dieser Artikel erschien in robotik-produktion.de 2 2020 - 03.02.20.Für weitere Artikel besuchen Sie

